Công (vật lý học) – Wikipedia tiếng Việt
Trong vật lý, công là một đại lượng vô hướng có thể mô tả là tích của lực với quãng đường dịch chuyển mà nó gây ra, và nó được gọi là công của lực. Chỉ có thành phần của lực theo phương chuyển động ở điểm đó thì mới gây ra công. Khái niệm công được đề ra đầu tiên vào năm 1826 bởi nhà toán học người Pháp Gaspard-Gustave Coriolis.
Đơn vị SI của công là joule ( J ), được định nghĩa là công thực thi bởi một newton làm di dời một đoạn có chiều dài một mét. Đơn vị tương tự là newton-mét ( N.m ) cũng được sử dụng nhiều lúc, nhưng điều này hoàn toàn có thể gây nhầm lẫn với đơn vị chức năng newton-mét dùng cho Mô men .
Các đơn vị không phải SI của công bao gồm erg, foot-pound, foot-poundal, và litre-atmosphere. Những đơn vị khác là mã lực, therm, BTU và Ca-lo. Điều quan trọng phải nhớ là nhiệt lượng và công có cùng đơn vị đo.
Bạn đang đọc: Công (vật lý học) – Wikipedia tiếng Việt
Nhiệt lượng không được xem xét như là một dạng công, vì nguồn năng lượng được truyền cho sự rung của những phân tử chứ không phải là sự di dời vĩ mô. Tuy nhiên, nhiệt lượng hoàn toàn có thể gây ra công bởi sự co và giãn khí trong một xi-lanh như là trong động cơ của xe hơi .
Tính toán toán học[sửa|sửa mã nguồn]
Tính toán công như là “lực nhân đoạn thẳng đi được” chỉ có thể thực hiện trong những trường hợp đơn giản mô tả ở trên. Nếu lực biến thiên, nếu vật chuyển động theo một đường cong, có thể là quay, thì chỉ có phần quỹ đạo của điểm tác dụng lực mới tạo nên công, và chỉ có thành phần của lực song song với phương vận tốc của điểm đó của lực mới gây nên công (công dương khi cùng hướng với vận tốc, âm khi ngược hướng). Thành phần này của lực có thể mô tả như một đại lượng vô hướng gọi là thành phần lực tiếp tuyến (
F
cos
θ
{\displaystyle F\cos \theta }

θ
{\displaystyle \theta }

- Công của lực là tích phân đường của thành phần lực tiếp tuyến theo quỹ đạo của điểm tác dụng lực.
Lực và độ dời[sửa|sửa mã nguồn]
Nếu một lực
F
→
{\displaystyle {\vec {F}}}

d
→
{\displaystyle {\vec {d}}}

F
→
{\displaystyle {\vec {F}}}
và
d
→
{\displaystyle {\vec {d}}}
:
- A = F → ⋅ d → = F d cos θ { \ displaystyle A = { \ vec { F } } \ cdot { \ vec { d } } = Fd \ cos \ theta }

với θ { \ displaystyle \ theta } là góc giữa vectơ lực và vectơ độ dời .
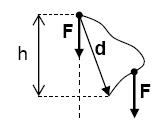 Trọng lực F = mg gây công A = mgh theo bất kể quỹ đạo rơi nào
Trọng lực F = mg gây công A = mgh theo bất kể quỹ đạo rơi nào
Khi mà độ lớn và hướng của lực không đổi, quỹ đạo của vật có thể theo bất kỳ hình dạng nào: công thực hiện là độc lập với quỹ đạo và được xác định bởi chỉ một vectơ độ dời tổng cộng
d
→
{\displaystyle {\vec {d}}}
. Một ví dụ dễ thấy là công thực hiện bởi trọng lực – xem hình. Vật rơi xuống theo một đường cong, nhưng công được tính từ
d
cos
θ
=
h
{\displaystyle d\cos \theta =h}
, nó cho một kết quả quen thuộc

A
=
m
g
h
{\displaystyle A=mgh}

Nếu lực gây ra ( hay tác động ảnh hưởng ) đến sự quay của vật, hay vật không rắn, thì độ dời của điểm mà lực công dụng được dùng để tính công. Trong trường hợp lực đổi khác theo thời hạn, phương trình ( 1 ) không hề vận dụng được nữa. Nhưng khả dụng nếu chia hoạt động thành nhiều bước nhỏ, đến mức lực hoàn toàn có thể coi giao động là hằng số trong mỗi bước, và công tổng số sẽ là tổng công những bước. Điều này sẽ trả lại một tác dụng xê dịch, mà nó hoàn toàn có thể được cải tổ khi chia nhỏ những bước hơn thế nữa ( vi phân ). Và tác dụng đúng mực thu được là số lượng giới hạn toán học của quy trình này, dẫn đến định nghĩa dưới đây .Định nghĩa chung cho công cơ học được cho bởi tích phân đường sau đây :
- A C = ∫ C F → ⋅ d x → = ∫ C F → ⋅ v → d t { \ displaystyle A_ { C } = \ int _ { C } { \ vec { F } } \ cdot d { \ vec { x } } = \ int _ { C } { \ vec { F } } \ cdot { \ vec { v } } dt }

với :
- C { \ displaystyle C }
- F → { \ displaystyle { \ vec { F } } }lực;
- x → { \ displaystyle { \ vec { x } } }
vị trí; và
- v → = d x → / d t { \ displaystyle { \ vec { v } } = d { \ vec { x } } / dt }
vận tốc của nó.

Phương trình ( 2 ) lý giải làm thế nào một lực khác không hoàn toàn có thể thực thi công minh không. Trường hợp đơn thuần nhất là lực luôn vuông góc với phương hoạt động, tạo nên một tích phân luôn bằng không. Nó xảy ra khi vật hoạt động tròn. Tuy nhiên, kể cả khi nếu tích phân nhiều lúc có một giá trị khác không, nó vẫn hoàn toàn có thể tích phân ra không nếu nhiều lúc nó dương và nhiều lúc nó âm .Sự hiện hữu của lực khác không tạo công minh không minh họa sự khác nhau giữa công và đại lượng tương quan, xung lượng, nó là tích phân của lực theo thời hạn. Xung lượng đo sự đổi khác động lượng của vật, một đại lượng vectơ có hướng, trong khi công chỉ nhờ vào độ lớn của tốc độ. Ví dụ như thể một vật hoạt động tròn đều hoạt động được 50% vòng, thì lực hướng tâm của nó không gây công, nhưng nó tạo một xung lượng khác không .
Mô men và sự quay[sửa|sửa mã nguồn]
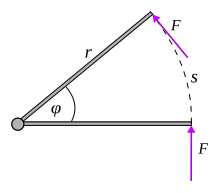 Một lực có độ lớn không đổi và vuông góc với cánh tay đòn
Một lực có độ lớn không đổi và vuông góc với cánh tay đòn
Công thực hiện bởi một mô men lực có thể được tính theo cách tương tự, như là một lực có độ lớn không đổi tác động vuông góc lên một cánh tay đòn. Tích phân tại phương trình (2) cho chiều dài quỹ đạo của điểm đặt lực là cung tròn
d
s
→
{\displaystyle d{\vec {s}}}

Tuy nhiên, cung tròn có thể được tính từ góc quay
φ
→
{\displaystyle {\vec {\varphi }}}

d
s
→
=
d
φ
→
×
r
→
{\displaystyle d{\vec {s}}=d{\vec {\varphi }}\times {\vec {r}}}

r
→
×
F
→
{\displaystyle {\vec {r}}\times {\vec {F}}}

M
→
{\displaystyle {\vec {M}}}

- A = ∫ F → ⋅ d s → = ∫ F → ⋅ ( d φ → × r → ) = ∫ ( r → × F → ) ⋅ d φ → { \ displaystyle A = \ int { \ vec { F } } \ cdot d { \ vec { s } } = \ int { \ vec { F } } \ cdot \ left ( d { \ vec { \ varphi } } \ times { \ vec { r } } \ right ) = \ int \ left ( { \ vec { r } } \ times { \ vec { F } } \ right ) \ cdot d { \ vec { \ varphi } } }
- = ∫ M → ⋅ d φ → = ∫ M → ⋅ ω → d t { \ displaystyle = \ int { \ vec { M } } \ cdot d { \ vec { \ varphi } } = \ int { \ vec { M } } \ cdot { \ vec { \ omega } } dt }
- = ∫ M → ⋅ d φ → = ∫ M → ⋅ ω → d t { \ displaystyle = \ int { \ vec { M } } \ cdot d { \ vec { \ varphi } } = \ int { \ vec { M } } \ cdot { \ vec { \ omega } } dt }


với
- M → { \ displaystyle { \ vec { M } } }mô men tác động vào vật;
- φ → { \ displaystyle { \ vec { \ varphi } } }
-
ω
→=
d
φ
→d
t{\displaystyle {\vec {\omega }}={\frac {d{\vec {\varphi }}}{dt}}}
vận tốc góc của vật quay.

Công và động năng[sửa|sửa mã nguồn]
Theo định lý công-động năng, nếu một hay nhiều ngoại lực tác động lên một vật rắn, làm cho động năng của nó biến thiên từ
E
k
1
{\displaystyle E_{k_{1}}}

E
k
2
{\displaystyle E_{k_{2}}}

A
{\displaystyle A}

- A = Δ E k = E k 2 − E k 1 = 1 2 m ( v 2 2 − v 1 2 ) { \ displaystyle A = \ Delta E_ { k } = E_ { k_ { 2 } } – E_ { k_ { 1 } } = { \ frac { 1 } { 2 } } m ( v_ { 2 } ^ { 2 } – v_ { 1 } ^ { 2 } ) }

với m là khối lượng của vật và v là tốc độ của nó .Định lý hoàn toàn có thể thuận tiện chứng tỏ cho trường hợp lực tính năng theo phương hoạt động theo một đường thẳng. Cho những trường hợp phức tạp hơn, ví dụ như một quỹ đạo cong hay lực biến hóa ( hay cả hai ), tất cả chúng ta hoàn toàn có thể sử dụng tích phân để lấy tác dụng tương tự. Trong cơ học vật rắn, một công thức tính công hoàn toàn có thể đổi khác thì động năng bằng cách sử dụng tích phân bậc nhất của định luật 2 Newton .
Để thấy được điều này, hãy khảo sát 1 vật P chuyển động theo một quỹ đạo
X
→
(
t
)
{\displaystyle {\vec {X}}(t)}

F
→
{\displaystyle {\vec {F}}}
tác động lên đó. Định luật 2 Newton cung cấp mối quan hệ giữa lực và gia tốc của vật:
- F → = m X → ″ { \ displaystyle { \ vec { F } } = m { \ vec { X } } ‘ ‘ }

với m là khối lượng của vật .Nhân vô hướng tốc độ của vật cho mỗi vế của định luật 2 Newton :
- F → ⋅ X → ′ = m X → ″ ⋅ X → ′ { \ displaystyle { \ vec { F } } \ cdot { { \ vec { X } } ‘ } = m { { \ vec { X } } ‘ ‘ } \ cdot { { \ vec { X } } ‘ } }

Tích phân từ điểm
X
→
(
t
1
)
{\displaystyle {\vec {X}}(t_{1})}

X
→
(
t
2
)
{\displaystyle {\vec {X}}(t_{2})}

- ∫ t 1 t 2 F → ⋅ X → ′ d t = m ∫ t 1 t 2 X → ″ ⋅ X → ′ d t. { \ displaystyle \ int _ { t_ { 1 } } ^ { t_ { 2 } } { \ vec { F } } \ cdot { { \ vec { X } } ‘ } dt = m \ int _ { t_ { 1 } } ^ { t_ { 2 } } { { \ vec { X } } ‘ ‘ } \ cdot { { \ vec { X } } ‘ } dt. }

Vế trái của phương trình là công của lực tác động lên vật dọc theo quỹ đạo từ thời điểm
t
1
{\displaystyle t_{1}}

t
2
{\displaystyle t_{2}}

- A = ∫ t 1 t 2 F → ⋅ X → ′ d t = ∫ X → ( t 1 ) X → ( t 2 ) F → ⋅ d X → { \ displaystyle A = \ int _ { t_ { 1 } } ^ { t_ { 2 } } { \ vec { F } } \ cdot { { \ vec { X } } ‘ } dt = \ int _ { { \ vec { X } } ( t_ { 1 } ) } ^ { { \ vec { X } } ( t_ { 2 } ) } { \ vec { F } } \ cdot d { \ vec { X } } }

Tích phân này được tính dọc theo quỹ đạo X → ( t ) { \ displaystyle { \ vec { X } } ( t ) } của vật và do đó phụ thuộc vào vào quỹ đạo .Vế phải của phương trình tích phân bậc nhất định luật 2 Newton hoàn toàn có thể được đơn thuần khi sử dụng biểu thức sau :
- 1 2 d d t X → ′ 2 = X → ″ ⋅ X → ′ { \ displaystyle { \ frac { 1 } { 2 } } { \ frac { d } { dt } } { { \ vec { X } } ‘ } { } ^ { 2 } = { { \ vec { X } } ‘ ‘ } \ cdot { { \ vec { X } } ‘ } }

Biểu thức trên hoàn toàn có thể tích phân thuận tiện để chuyển thành động năng :
- Δ E k = m ∫ t 1 t 2 X → ″ ⋅ X → ′ d t = 1 2 m ∫ t 1 t 2 d d t X → ′ 2 d t = 1 2 m X → ′ 2 ( t 2 ) − 1 2 m X → ′ 2 ( t 1 ) { \ displaystyle \ Delta E_ { k } = m \ int _ { t_ { 1 } } ^ { t_ { 2 } } { { \ vec { X } } ‘ ‘ } \ cdot { { \ vec { X } } ‘ } dt = { \ frac { 1 } { 2 } } m \ int _ { t_ { 1 } } ^ { t_ { 2 } } { \ frac { d } { dt } } { { \ vec { X } } ‘ } { } ^ { 2 } dt = { \ frac { 1 } { 2 } } m { { \ vec { X } } ‘ { } ^ { 2 } ( t_ { 2 } ) } – { \ frac { 1 } { 2 } } m { { \ vec { X } } ‘ { } ^ { 2 } ( t_ { 1 } ) } }

với động năng của vật được định nghĩa như sau :
- E k = 1 2 m X → ′ 2 { \ displaystyle E_ { k } = { \ frac { 1 } { 2 } } m { { \ vec { X } } ‘ { } ^ { 2 } } }

Và tác dụng là định lý công-động năng cho vật rắn hoạt động :
- A = Δ E k { \ displaystyle A = \ Delta E_ { k } }

Công và hiệu suất[sửa|sửa mã nguồn]
Tốc độ công triển khai bởi một lực ( đo bằng joule / giây, hay là watt ) là tích vô hướng của một lực ( một vectơ ) với lại vận tốc đổi khác vectơ độ dời, hay là vectơ tốc độ của điểm đặt lực. Phép nhân vô hướng này giữa lực và tốc độ này được gọi là hiệu suất tức thời .
- P. = F → ⋅ v → { \ displaystyle P = { \ vec { F } } \ cdot { \ vec { v } } }

Cũng như là vận tốc có thể được tích phân theo thời gian để ra quãng đường, thì theo cơ bản của định lý tích phân, tổng công dọc theo một quỹ đạo là tích phân theo thời gian của công suất tức thời tác động dọc theo quỹ đạo của điểm đặt lực.
Hệ quy chiếu[sửa|sửa mã nguồn]
Công thực thi bởi lực tác động ảnh hưởng vào một vật nhờ vào vào cách chọn hệ quy chiếu do tại độ dời và tốc độ là phụ thuộc vào vào hệ quy chiếu mà trong đó tất cả chúng ta khảo sát .Độ biến thiên động năng cũng phụ thuộc vào vào cách chọn hệ quy chiếu chính do động năng là một hàm theo tốc độ. Tuy nhiên, bỏ lỡ cách chọn hệ quy chiếu, định luật công-động năng vẫn đúng và công thực thi vẫn bằng độ biến thiên động năng .
Source: https://trangdahieuqua.com
Category: Làm đẹp


